OpenScope Automation
Progress




Goals
- This project centres around high-throughput screening of bacterial colonies and immature plants using a microscope mounted on a desktop CNC machine (a large x,y,z-translation system; see below)
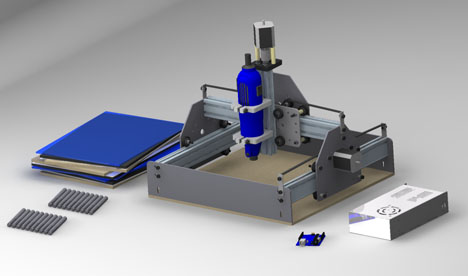
Shapeoko desktop CNC machine
- Ultimately, the goal is to develop a robot that can screen colonies for a pre-programmed characteristic (e.g. diameter, fluorescence etc.) reliably, and faster than a human.
- The requirements for the screening robot are that it must be able to screen relatively large numbers of samples, that different varieties of sample can be used, that new experiments can be programmed in by scientists and that the screening is reliable.
Specific Tasks
- Constructing the desktop CNC machine using a pre-purchased kit (from instructions)
- Designing a 3D-printed microscope module to attach to the ‘head’ of the CNC machine
- Integrating the microscope electronics (Raspberry Pi, Arduino) with the CNC machine
- Improving current software for the control of the CNC (user-interface), for the implementation of difference experiment ‘modules’ and for image-recognition
- Improving current image-stitching software to allow the creation of a Google-maps like interface for the sample field
- Designing the optics module to allow macroscopic and microscopic imaging as needed (depending on how well things go, this may include implementing fluorescence imaging)
- Running experiments using real-world biological samples/mimics to test the prototypes
- Comprehensive hardware documentation so that other groups can reproduce the product easily
- Writing-up of results, and ideally publication